Chromatography and tangential flow filtration equipment
Discover
Need help?
Specify a keyword related to an offer, a sector of activity, a blog article or any content present on the R&D Technology site

Robotics and cobotics (collaborative robotics) are expanding in the pharmaceutical industry to meet the challenges of performing dangerous, precise, arduous or repetitive tasks, thereby increasing productivity while limiting the risk of MSDs (musculoskeletal disorders).
Given this context, R&D Technology and a pharmaceutical group co-developed an innovative solution for the robotic loading of glass cartridges to feed an existing automated line that used to be loaded manually.
Product
Glass vials
Need
Robotic loading of glass cartridges to feed an existing automated line
Special features
Features
Rate
330 bottles per minute
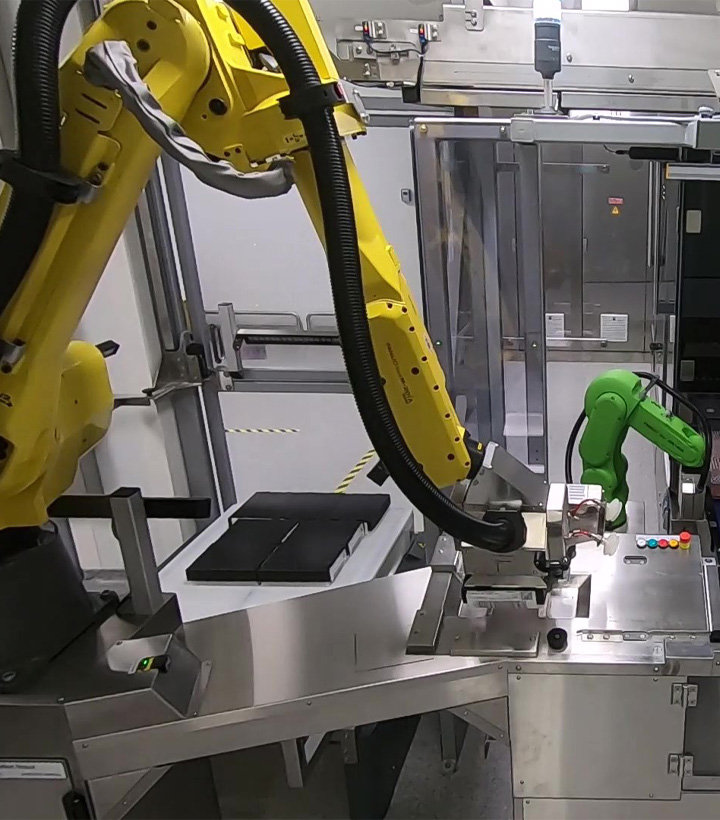
The operations of the first robot start with picking up the trays containing the cartridges from the pallet using a 3D camera. The robot then reads the barcodes on the trays, cuts the labels linking the lid and the base of the trays and removes the lid.
Once opened, the contents of the tray are monitored by a camera using artificial intelligence. After opening the front of the tray by an automated system, the first cobot enters the tray with a suitable tool to hold and carefully slide the glass cartridges onto the conveyor without risk of damaging them but also in complete safety for the operator who may be in the immediate vicinity.
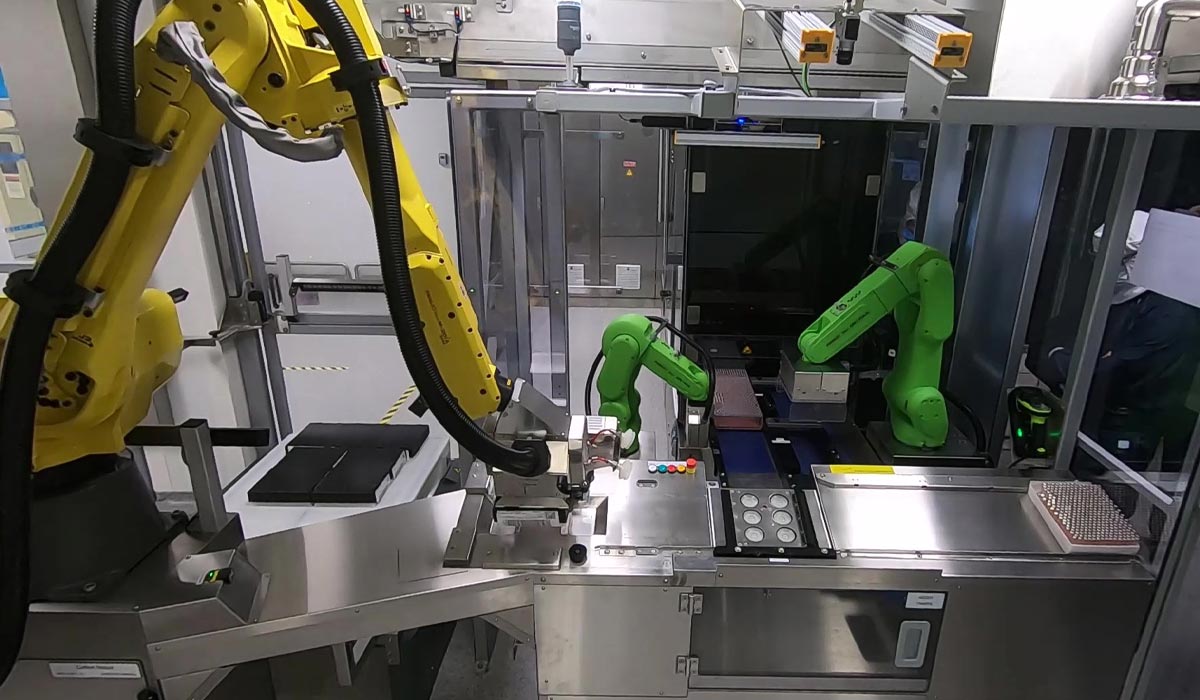
The second cobot is responsible for continuously accompanying the cartridges positioned on the feed conveyor of the automated line. This is essential to avoid any risk of dropping the cartridges, which must not be left unsecured at any time.
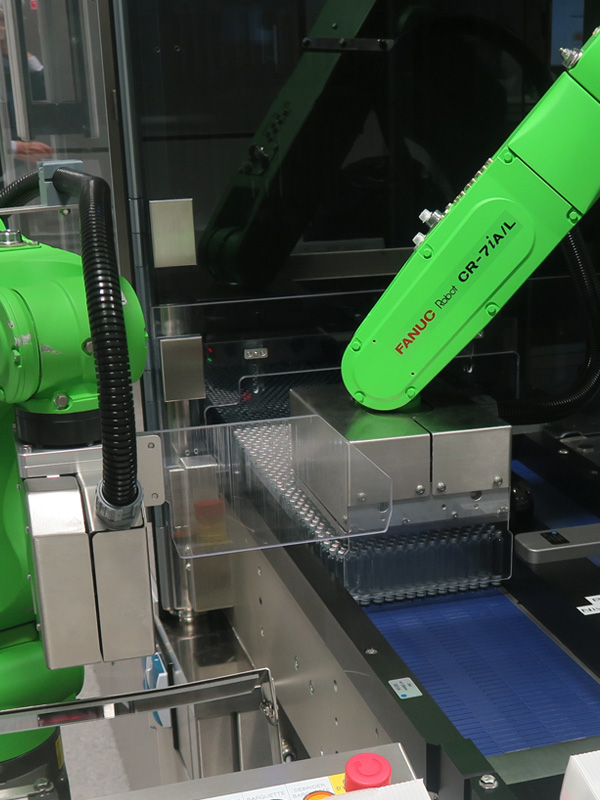
As soon as the consumption of cartridges by the existing automated line requires the supply of a new batch of cartridges, the first cobot is responsible for sliding the batch of cartridges held between its 2 plates into contact with the accompanying plate of the second cobot, the whole being synchronised with the advance of the cartridges on the conveyor belt. At this point, the second cobot disengages its push plate to position it behind the first cobot’s gripper so as to resume its holding role and allow the first cobot to disengage.
To ensure operator safety, a multi-field laser scanner system was implemented, which allows the robots to run at full speed when the operator is not present and to switch to collaborative mode as soon as the operator approaches the programmed area.